انواع ربات ها
انواع ربات ها
در ادامه تعدادی از رباتها با جزئیات شرح داده میشوند:
1- ربات های اسباب بازی

ربات های اسباب بازی با تغییر جهت کار می کنند. باوجود اینکه اسم این ربات ها “اسباب بازی” است، اما به این معنا نیست که حرکت نمی کنند، بلکه پایه ی این ربات ها ثابت است. این ربات ها با کنترل موقعیت و جهت عملگر نهایی با محیط اطراف خود سازگار می شوند. این ربات های اسباب بازی عبارت اند از ربات های مفصلی، ربات های کارتزی، ربات های استوانه ای، ربات های کروی، ربات های اسکارا و ربات های موازی.
2- ربات های چرخ دار
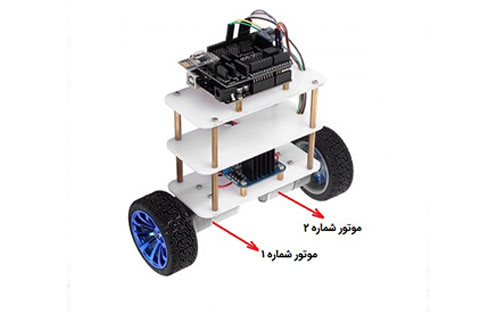
ربات های چرخ دار، ربات هایی هستند که جهت حرکتشان با کمک چرخ ها تغییر پیدا می کند. از نظر فنی، این ربات ها به راحتی با کمک چرخ حرکت می کنند و هزینه ی بسیار پایینی دارند. علاوه براین، کنترل حرکت چرخ ها معمولا آسان است. به همین دلیل است که تولید ربات های چرخ دار بیشتر است. ربات های تک چرخ، ربات های توپی متحرک و ربات های دو چرخ، سه چرخ، چهار چرخ، چند چرخ و ربات های ردیاب، نمونه هایی از ربات های چرخ دار هستند.
3- ربات های پادار
ربات های پادار، ربات هایی متحرک و شبیه به ربات های چرخ دار هستند، اما روش های حرکت دادن آن ها نسبت به ربات های چرخ دار پیچیده تر و حرفه ای تر است. همان طور که از نام این ربات ها پیدا است، این ربات ها از پاهای خود برای کنترل حرکت خود استفاده می کنند و در مقایسه با ربات های چرخ دار، در سطوح ناهموار عملکرد بهتری دارند.
علی رغم اینکه هزینه ی تولید و پیچیدگی این ربات ها بالا است، اما این ویژگی ربات های پادار که روی سطوح نامنظم حرکت می کنند، باعث شده تا کاربران بسیاری داشته باشد. ربات های یک پا، دو پا، سه پا، چهار پا، شش پا و چند پا نمونه هایی از این ربات ها هستند.
4- ربات های شناگر- ربات ماهی
ربات های شناگر، ربات هایی هستند که زیر آب حرکت می کنند. این ربات ها با الهام از ماهی ها تولید شده اند و از عملگر های باله ماند خود برای حرکت در آب استفاده می کنند.
5- ربات های پروازی

ربات های پروازی، ربات هایی هستند که با استفاده از بال های شبیه به بال هواپیما یا پرندگان/حشرات، پروانه ها یا بالون در هوا پرواز می کنند.
6- رباتهای گروهی
ربات های گروه ی، ربات هایی هستند که از چندین ربات کوچک تشکیل شده اند. این ربات ها از لحاظ ساختار شبیه به یک ربات واحد نیستند، اما ماژول های ربات به صورت گروهی کار می کنند. اگرچه سیستم این ربات ها شبیه به سیستم های مدولار است، اما اجزاء ربات های گروهی، عملکرد ضعیف تری دارند و پیکربندی گروهی نمی تواند ربات های جدیدی بسازد.
7- ربات های مدولار
سیستم های رباتیک مدولار همانند ربات های گروهی از چندین ربات در پیکربندی خود تشکیل شده اند. ماژول این سیستم ها درمقایسه با ربات های گروهی، کاربردی تر هستند. به طور مثال، ماژول یک سیستم رباتیک مدولار می تواند به تنهایی حرکت و کار کند. نیروی ربات های مدولار از جریان موجود در پیکربندی آن تامین می شود. ماژول های یک سیستم رباتیک مدولار می توانند پیکربندی های مختلفی ایجاد کنند و ربات هایی که به این روش ساخته می شوند، قابلیت های منحصر به فردی دارند.
8- ربات های میکرو
ربات های میکرو به آن دسته از ربات هایی گفته می شود که ابعاد آن ها در مقیاس میکرومتر است و ربات هایی که می توانند در مقیاس میکرومتر عمل کنند. بنابراین، این ربات های بسیار بزرگ که می توانند محیط را در مقیاس نانومتر تغییر دهند و ربات های کوچکی که با میکرومترها اندازه گیری می-شوند، ربات های میکروموتور نامیده می شوند.
9- ربات های نانو
تعریف ربات های نانو نیز مانند ربات های میکرو تاحدی پیچیده است. منظور از ربات های نانو، ربات های دارای ابعاد نانومتر و ربات هایی است که می توانند محیط اطراف خود را با وضوح مقیاس نانومتر تغییر دهند.
10 – ربات های کشسانی نرم
ربات های کشسانی/نرم از انواع جدیدترین ربات های تولیدی هستند. این ربات ها معمولا زیست الهام هستند. عملکرد و ساختار این ربات ها بیشتر شبیه به ماهی مرکب یا کرم های ابریشم است.
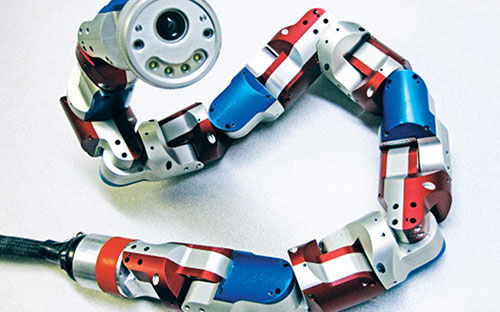
11- ربات های ماری
12- ربات های خزنده
13- ربات های ترکیبی
برگرفته از وب سایت .http://www.robotpark.com/All-Types-Of-Robots
